Specifications
Specs
- Weight: 2245g (total)
- Base: 895g
- Shoulder: 176g
- Arm: 820g
- Elbow: 130g
- Forearm: 123g
- Wrist: 101g
- Payload: ~300 g
- Degrees of freedom: 6 rotating joints
- Material: 3D printed PA-CF
- Repeatability: 1 mm
- Rotation range:
- 1: -170 – 170 deg
- 2: -73 – 90 deg
- 3: 35 – 180 deg
- 4: -180 – 180 deg
- 5: -120 – 120 deg
- 6: -720 - 720 deg
Components
Electrical
-
PCBs (This will be covered detailly in Electronics Page.)
- NEMA 17 Bipolar Stepper Motor (1.8 deg)
- NEMA 17 Bipolar Stepper Motor (1.8 deg) Pancake
Mechanical
-
3D-printed parts (structural)
-
3D-printed parts (decoration)
-
bearings
-
belts
- misumi
Operating temperatures
Stepper motors can operate without issue in the range of 100 - 110 degrees. Generally, the temperatures of motors fall within the 40 - 60 degrees range. The temperature of the REF board is approximately 50 degrees.
Dimensions
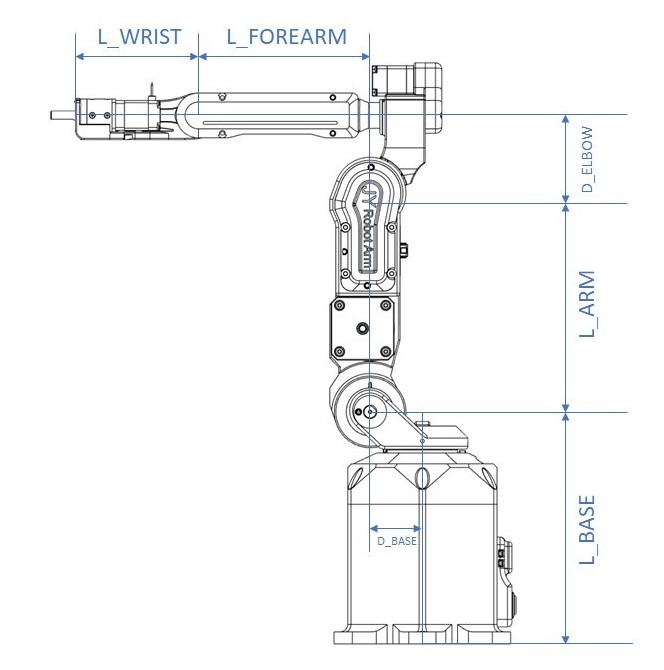
| Link | Length |
|---|---|
| D_BASE | 35 mm |
| L_BASE | 109 mm |
| L_ARM | 146 mm |
| D_ELBOW | 52 mm |
| L_FOREARM | 115 mm |
| L_WRIST | 82 mm |
Kinematic diagram
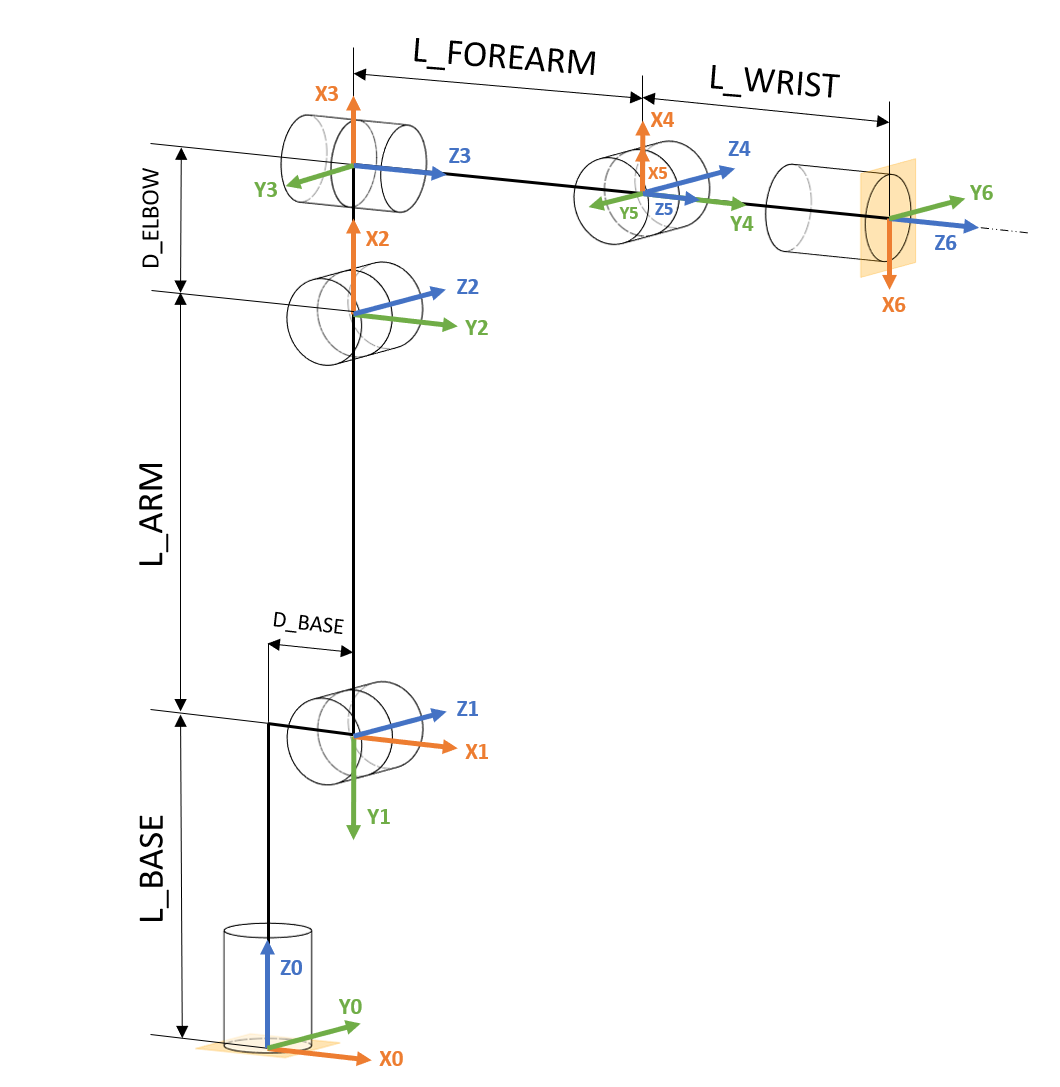
- Digram for the robot using standard pneumatic gripper
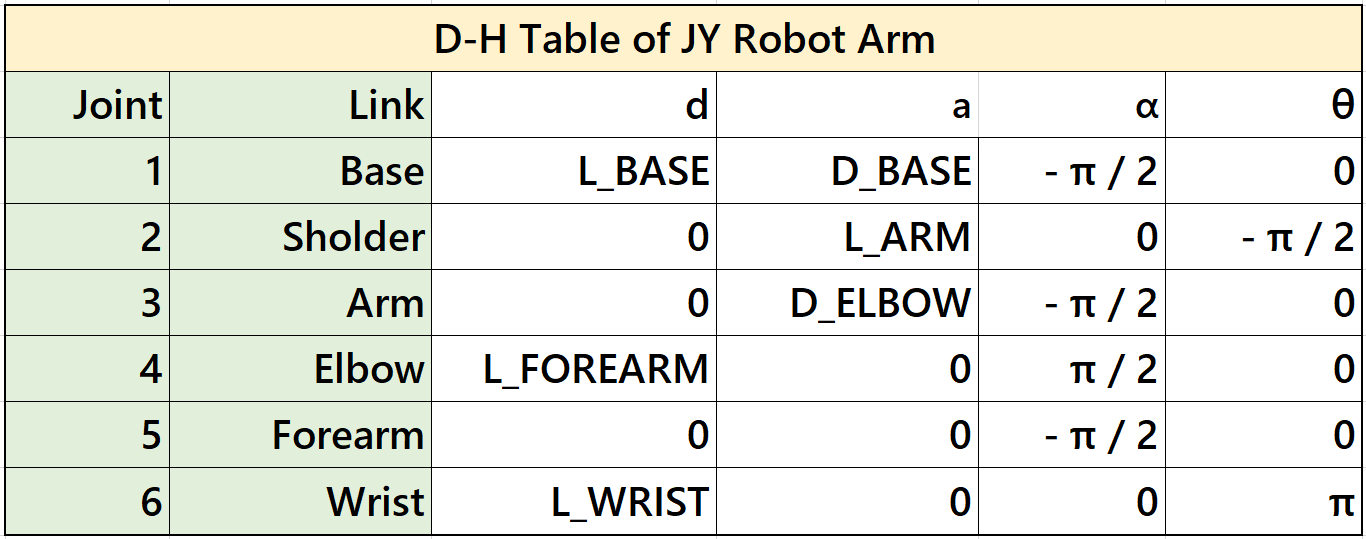
Denavit-Hartenberg parameters
Joint reduction ratios and microstepping
Reduction ratios for each joint are as follows:
- Joint 1 -> Harmonic gearbox: 50 : 1
- Joint 2 -> Harmonic gearbox: 30 : 1
- Joint 3 -> Harmonic gaerbox: 30 : 1
- Joint 4 -> Harmonic gaerbox: 30 : 1
- Joint 5 -> Harmonic gaerbox: 30 : 1
- Joint 6 -> Planterary gearbox: 5.2 : 1
Joint limits
Robot joint positive rotations are in the directions shown on the image.
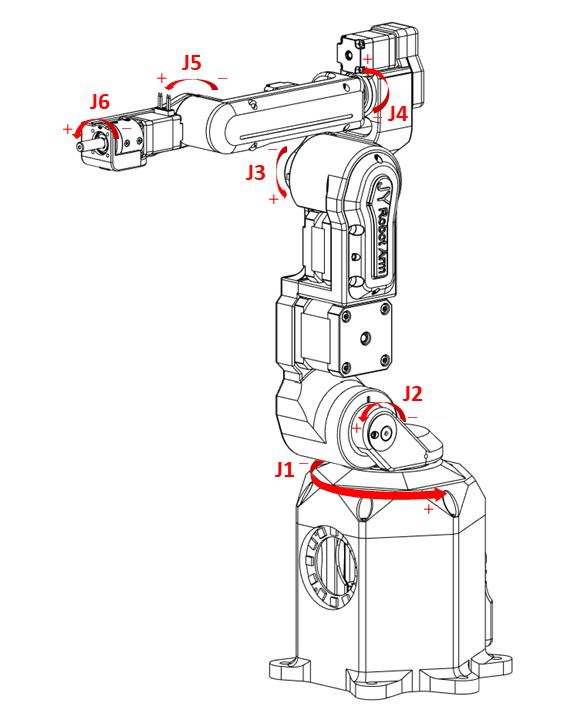
| Joint | Limit in negative direction | Standby position | Limit in positive direction |
|---|---|---|---|
| J1 | -170 | 0 | 170 |
| J2 | -73 | 0 | 90 |
| J3 | 35 | 90 | 180 |
| J4 | -180 | 0 | 180 |
| J5 | -120 | 0 | 120 |
| J6 | -720 | 0 | 720 |